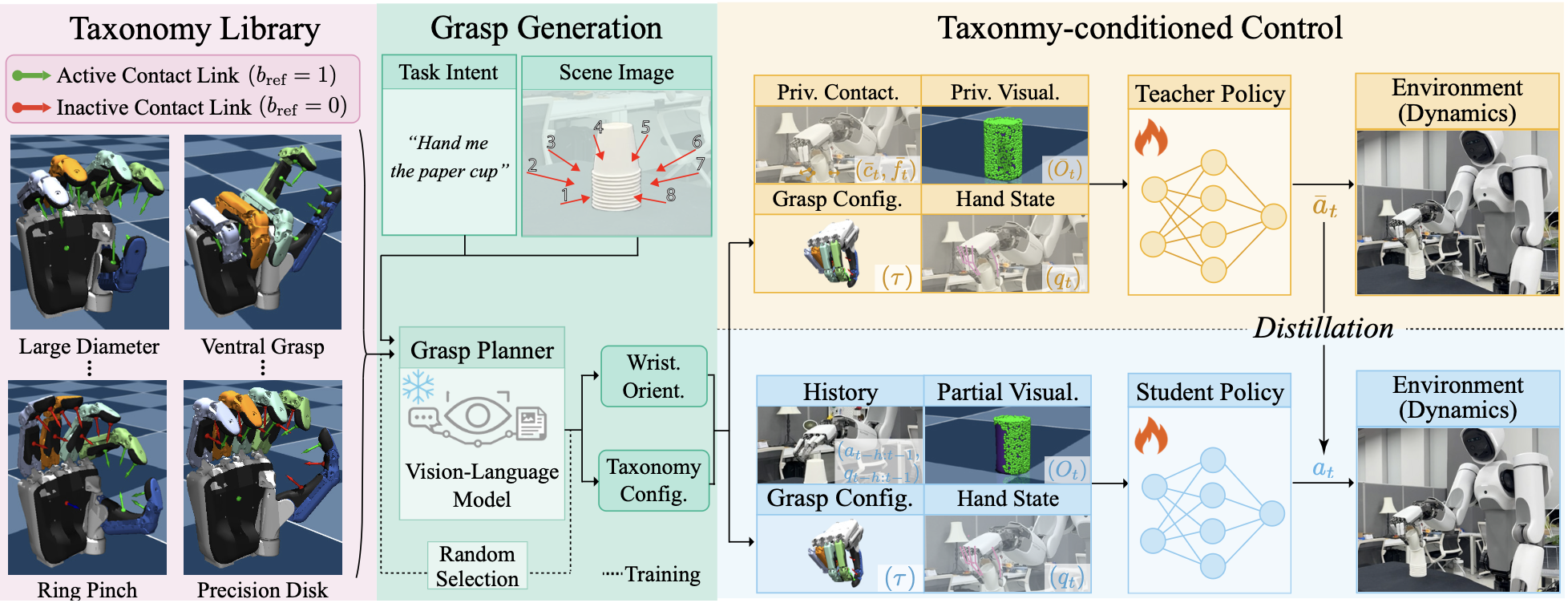
- [June 2026]: Our paper about Learning Dexterous Grasping from Sparse Taxonomy Guidance got accepted to IROS 2026.
- [October 2025]: Our lab is conducting a joint demonstration with RLWRLD. (video link)
- [March 2025]: Started my Ph.D. at Korea University, advised by Sungjoon Choi.
- [February 2025]: Graduated from the Department of Artificial Intelligence at Chung-Ang University with a M.S. degree..
- [Feburary 2025]: I am presenting our work about placement aware grasp planning in Korea Robotics Society Annual Conference (KRoC) as invited speaker in flagship conference session.
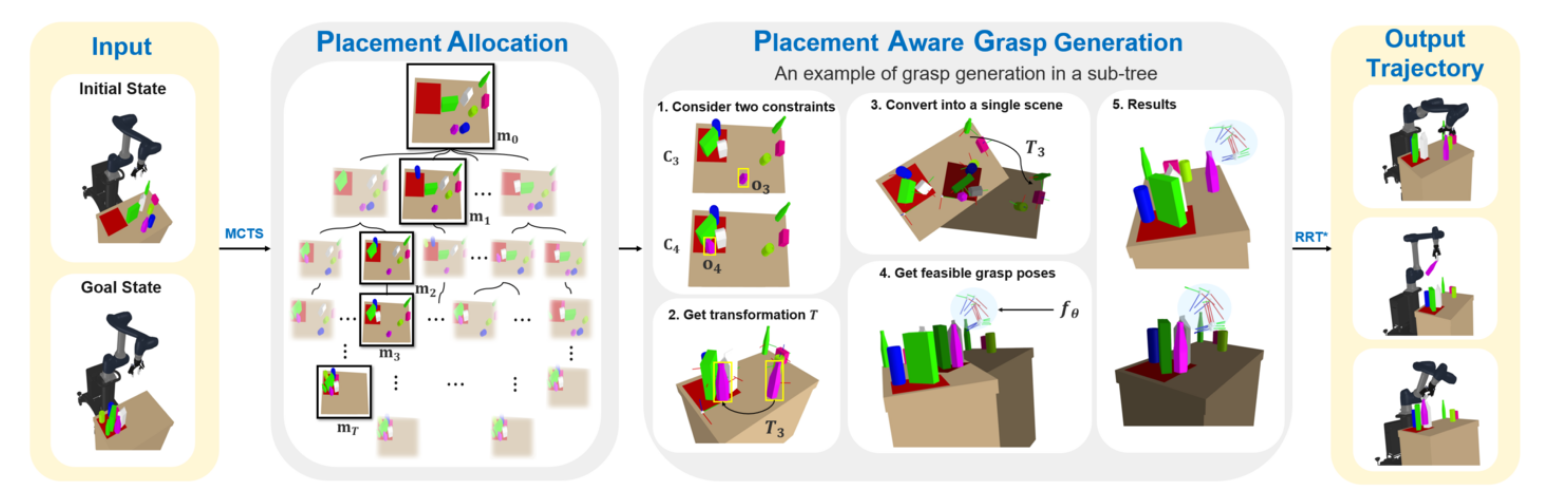
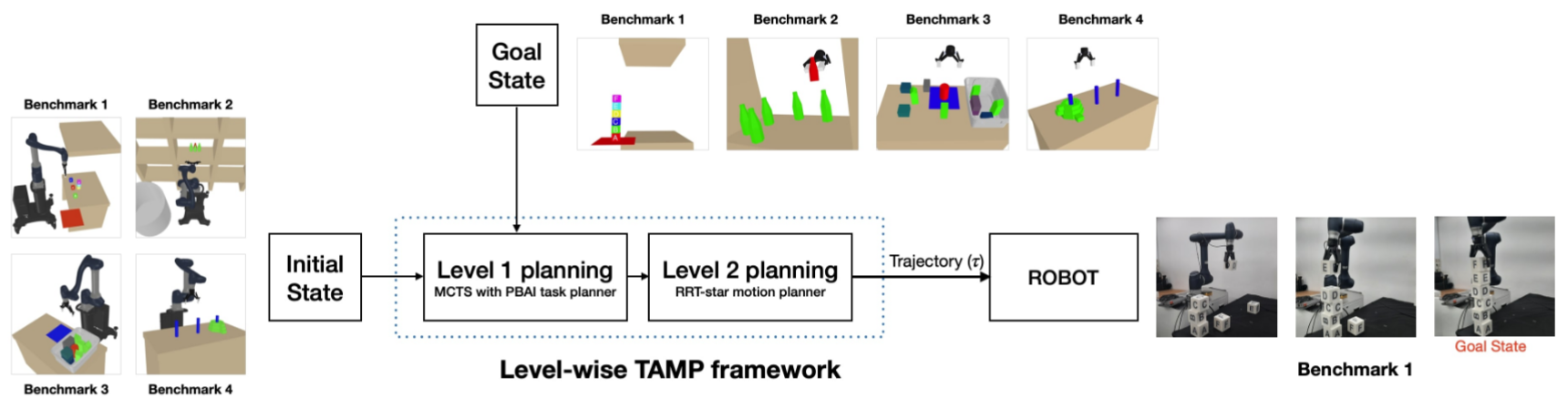
- [October 2024]: Our paper about Placement Aware Grasp Planning for Efficient Sequential Manipulation got published to ECAI 2024.
- [May 2023]: Our paper about Efficient Task Planning with MCTS got published to ICRA 2023.
- [March 2023]: I have started my M.S. at the Department of Artificial Intelligence at Chung-Ang University, advised by Kyungjae Lee.
Hello, I'm Juhan Park
I am a Ph.D student at Korea Unversity, where I work with Sungjoon Choi on artificial inteligence and robotics. Previously, I received my M.S. from the Department of Artificial Intelligence at Chung-Ang University, advised by Kyungjae Lee.
My focus is on robot learning for autonomous systems, with a recent emphasis on dexterous hand manipulation. I aspire to integrate this robotic intelligence into the agricultural sector to enable sophisticated automation.